2026.05 · Industry
DISCUSSION
SOSLAB
MOU 체결
국내 LiDAR Tier-1 SOSLAB과 MOU 체결. 시뮬 환경 내 semantic + Force/Stress 통합 라벨링 협력 논의 — 다양한 공동 PoC · 연구 가능성 탐색.
로봇이 무언가를 안전하게 쥐려면 '얼마나 세게'를 알아야 합니다. 산업 변형체 자동화에 필요한 측정 기반 Force/Stress 데이터 — 그 층은 아직 비어 있습니다. Space AI가 그 표준 후보 레이어를 가장 먼저 검증하고 있습니다.

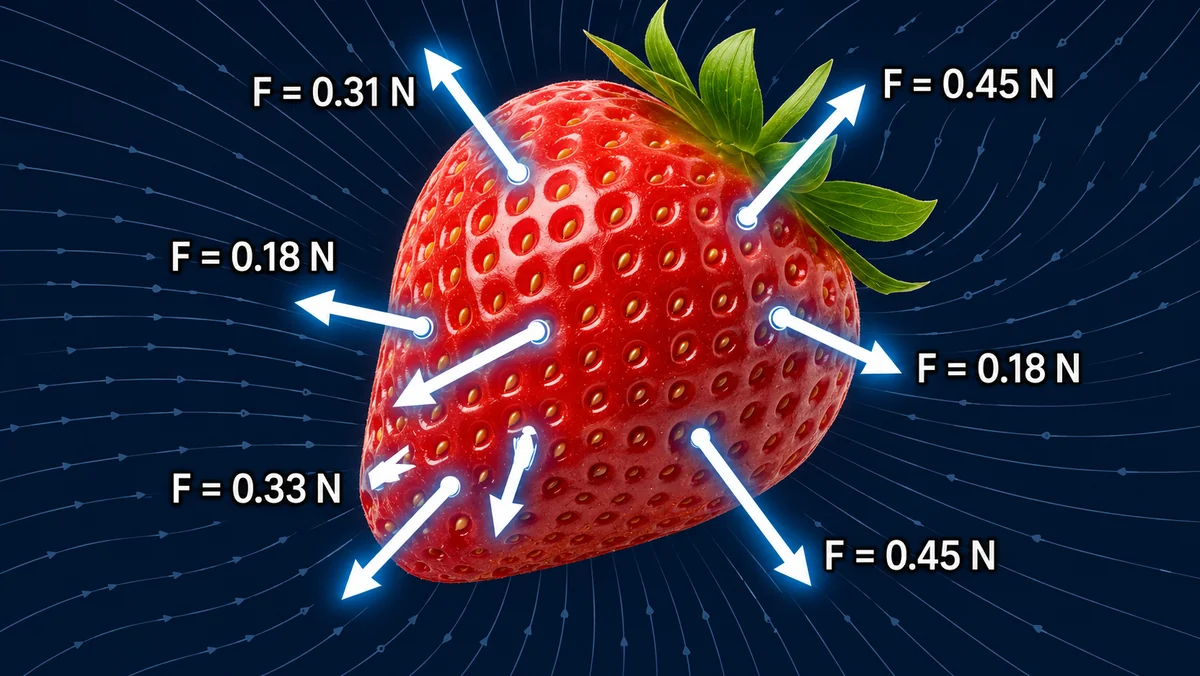
딸기 하나를 으깨지 않고 집으려면 로봇은 얼마나 세게 쥘 수 있는지를 알아야 합니다. Vision만 학습한 로봇의 고전 파지 성공률은 22% — 측정 기반 Force/Stress를 더하면 84.2%로 뛰어오릅니다. 그 정답 데이터가 산업 규모로는 거의 존재하지 않습니다.


로봇 학습은 NVIDIA Isaac Sim·Lab 위로 옮겨지고 있습니다. 질문은 하나 — 그 가상 무대에 '무엇'이 채워져 있는가.
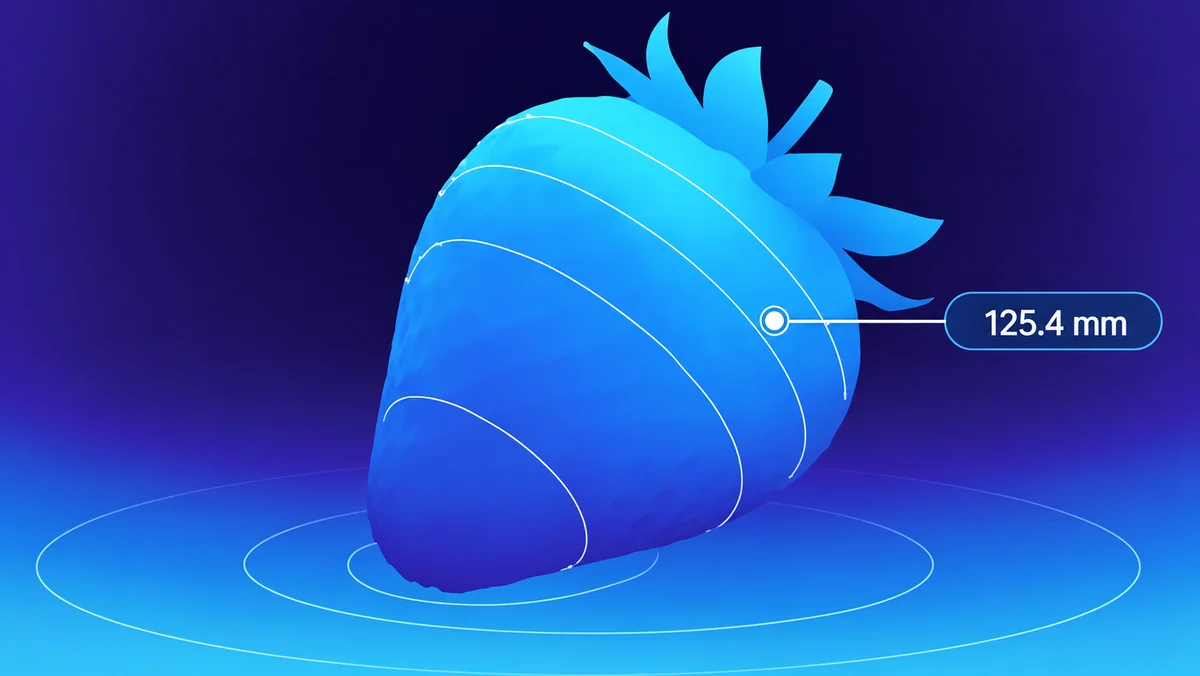
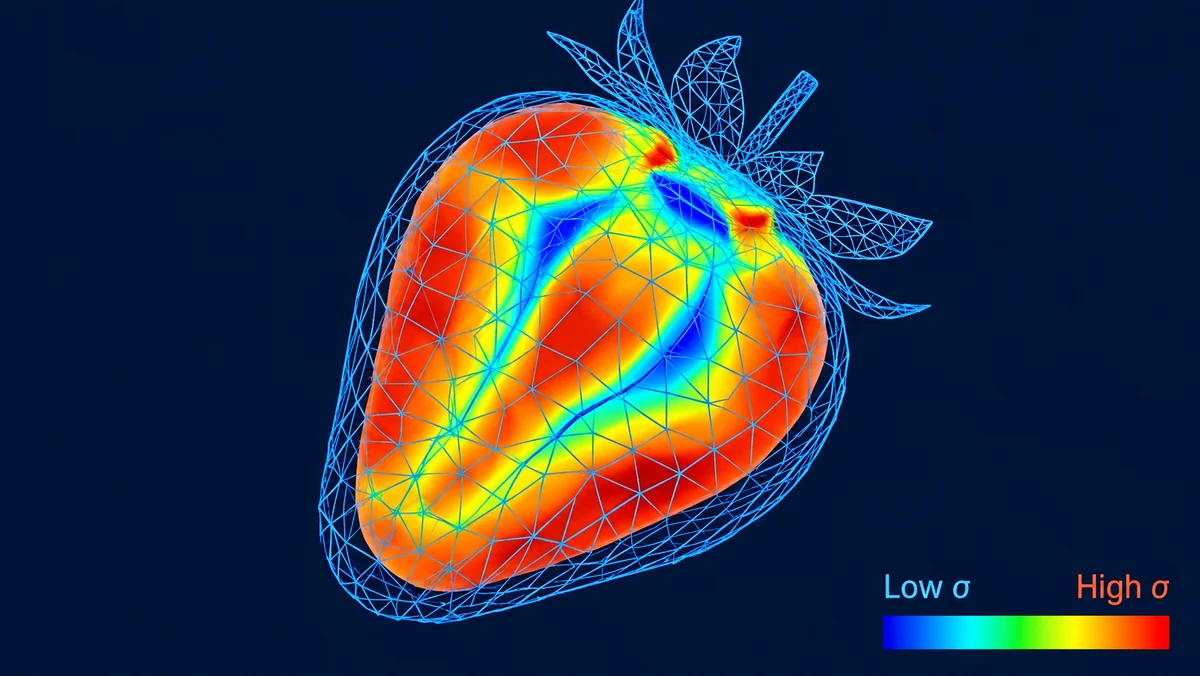
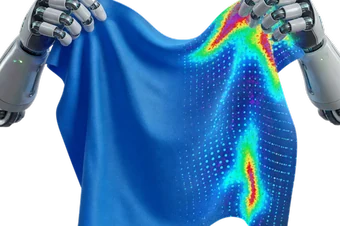
FEM/MPM/PBD 기반 deformable-contact simulation으로 물체의 변형·접촉력·응력장을 계산해 RGB · Depth · Force · Stress 4중 레이어를 같은 좌표계에서 정렬된 ground-truth로 출력합니다. L3(Force)·L4(Stress)는 대부분의 합성 데이터셋이 제공하지 않는 레이어입니다.


PoC 검토 전에 가장 자주 받는 질문 — "진짜 작동하나요?" 답은 자체 시연 영상이 아니라, 내부 controlled validation으로 확인한 정량 데이터입니다. 외부 재현 검증은 2026.12를 목표로 준비 중입니다. 핵심은 보정 합성이 실측 단독을 상회한다는 것 (78.6% > 72.3%) — 부족한 엣지 케이스를 합성이 메워 데이터 수집 비용을 급감시킵니다. 모든 수치는 재현 가능한 controlled experiment 기반이며, 제3자 재현은 2026.12 예정입니다.
내부 controlled validation · FR3 로봇 · 정밀 객체 파지
내부 controlled validation 기준 · 외부 공개 benchmark 아님 · 고객사 PoC 전환 시 동일 프로토콜로 재측정 예정
2024 ~ 2026 누적 · 선정 / MOU / 협업 논의 / 내부 검증 단계별 분류

Force / Stress Ground-Truth는 오늘 제조 라인의 마지막 10%를 풀고, 내일 Physical AI의 표준 후보 데이터 레이어가 됩니다.
자동차 호스, 광섬유 정렬, 식품 가공 — 연성체가 막아온 자동화의 끝자락. 이 한 시장만으로도 검증 · 계약 · 매출이 시작됩니다.
휴머노이드가 사람의 작업 환경에 들어오려면, 시각뿐 아니라 접촉 물리를 이해해야 합니다. 그 시대의 한계는 하드웨어가 아니라, 로봇에게 물리를 가르치는 데이터입니다.
Scale AI는 자율주행 데이터 인프라가 독립적인 기업 가치가 될 수 있음을 보여줬습니다.
휴머노이드·로봇 파운데이션 모델 기업들은 이미 멀티-빌리언 달러 밸류에이션을 받고 있습니다. 그러나 대부분은 모델과 하드웨어에 집중합니다.
Space AI는 그 모델들이 접촉 물리를 학습하기 위해 필요한 Force/Stress 데이터 레이어에 집중합니다.
3년 만에 정부 · 산업 · 글로벌 3-Track 병행. 누적 외부 자금 ₩30억+, NVIDIA Inception · AWS Activate 크레딧 · H*** WIA 협업 논의, 그리고 TAI1 Summit @ InnoVEX 2026 발표 예정.
창업자는 누적 ₩30억+의 정부·민간 자금을 확보했고, NVIDIA Inception × StarFab 선정, AWS Activate 크레딧 확보, H*** WIA Force 데이터 협업 논의를 이끌었습니다. 올해 확보된 정부 R&D ₩10억은 과제 수행 인력·장비·데이터 구축 비용을 비희석 재원으로 지원합니다. Pre-A 라운드는 표준 후보 레이어 검증에 투입 — 오픈소스 우선 GTM(무료 공개 → 표준 후보 채택 검증 → 검증·보정·양산 유료 전환)입니다.

국내 LiDAR Tier-1 SOSLAB과 MOU 체결. 시뮬 환경 내 semantic + Force/Stress 통합 라벨링 협력 논의 — 다양한 공동 PoC · 연구 가능성 탐색.
전국 2위 선정 (4파이널). PhysGraspGen 오픈소스 코어 + 100만 프레임 데이터셋 공개. ₩2.5억 사업화 지원.
CES 2026 현장에서 물류 로보틱스 전문가 컨택 → AWS Korea 후속 미팅 → AWS Activate ₩1,500만 크레딧 확보. 글로벌 클라우드 인프라 접점.
국내 최대 자동차 부품사 중 한 곳과 Force 데이터 협업 논의 중. FEM 기반 변형체 거동 시뮬레이션 + 적용 공정 후보 탐색 단계.
로봇이 걷고 말하는 시대, 다음 병목은 '얼마나 세게 만져야 하는가'입니다.
측정 횟수는 0으로 수렴하고, 카메라만으로 물성을 추론하는 지능은 1로 수렴합니다. 두 곡선이 교차하는 그 지점부터, 우리는 용역이 아니라 인프라가 됩니다.
두 곡선이 만나는 임계점부터 — 측정 없이 카메라만으로 물성을 압니다. 그 교차가 해자입니다.
기간은 내부 비전 시나리오이며 투자의 확정적 약속이 아닙니다. 실제 진행은 KPI 달성 여부에 연동됩니다.
2012년 ImageNet이 Vision AI 시대를 열었듯, 2026년 Space AI는 한국이 주도하는 Touch(Physical) AI의 Force/Stress 데이터 표준 후보 레이어를 검증합니다.
로봇 시대의 패권은 껍데기가 아닌 '물리 지능'에 있습니다. 그 지능의 핵심 후보 인프라 — 지금 합류하십시오.
피지컬 AI는 5개 단계로 작동합니다. 반도체·하드웨어·시뮬 환경은 이미 성숙했고, 4단계 '부드러운 물체용 힘·응력 합성 데이터'가 차세대 데이터 레이어 영역입니다. Space AI가 그 자리에 들어갑니다.
자율주행과 휴머노이드 로봇이 발전해도, 로봇은 여전히 두부·천·광섬유 같은 부드러운 물질을 안정적으로 다루지 못합니다. 학습에 쓸 접촉력(Force)과 응력(Stress) 정답 데이터가 세상에 거의 없기 때문입니다.
게임 엔진(Unity·Unreal)의 물리는 겉눈에 보이는 물리입니다 — 산업용 로봇 학습에는 쓸 수 없습니다. Space AI는 학계가 30년 누적한 FEM·MPM·PBD를 자체 코드로 결합해 한 엔진에서 함께 구동시킵니다.

물체 내부의 힘 계산 + 압력·응력 분포 시각화. 공장에서 부품을 잡고 누르고 변형시킬 때 실제와 같은 응력을 만들어 냅니다.
입자와 격자를 결합한 계산 방식. 두부·반죽·식품 가공처럼 기존 엔진이 풀 수 없던 영역의 변형·응력 데이터를 만듭니다.
직물·섬유 전용 실시간 주름·장력·변형 계산. 의류·와이어 하네스·광섬유처럼 유연한 물체를 빠른 속도로 합성합니다.

Synthesis AI·Datagen 같은 기존 합성 데이터 회사들은 "이미지를 만들고 라벨을 붙이는" 방식입니다. 눈에 보이지 않는 힘과 응력 같은 정보는 누락됩니다. Space AI는 물리 상태를 먼저 계산하고 그 결과로 이미지가 도출되는 반대 방향의 파이프라인을 구축합니다.
Newton·Warp·Isaac Lab은 변형(deformation)을 GPU 위에서 시뮬레이션합니다. SpaceAI는 그 force·stress를 학습 가능한 supervision 라벨로 추출·정렬합니다 — 어떤 레이어도 대체하지 않고, 라벨이 필요한 지점에만 더하는 label-export layer입니다.
"처음부터 로봇을 직접 제어한다"는 부담을 제거. Off-line → Shadow → Assisted → Limited Automation 단계로 고객사가 통제권을 유지하며 검증합니다.
"기술이 흥미롭다"가 아닌 "당신 회사의 어느 KPI가 바뀌는가"의 답입니다. 투자 유치 미팅이 아닌, 회사의 매출·원가·품질·수주 경쟁력으로 직결되는 협업 검토 — 12주 PoC(Off-line 4주 + Shadow 8주)로 정량 검증 가능합니다.




투자 유치 마케팅이 아닙니다. IP 권리화 준비 · 협업 논의 · 정부 선정 · NVIDIA 큐레이션 등 공시 가능한 사실로만 구성됐습니다. 표준은 주장하지 않습니다 — 18개월, KPI로 검증합니다.
NVIDIA Isaac Sim과 보완 관계인 연성체 Force / Stress 데이터 레이어. NVIDIA Inception × StarFab APAC AI Accelerator 선정으로 Physical AI 데이터 인프라 가능성을 소개.
4-Layer Ground Truth 데이터 + FEM/MPM 자체 엔진 + Sim-to-Real 84.2% (내부 검증). N-UP 프로그램 최종 선정.
NVIDIA Inception × StarFab 공동 주최 TAI1 AI Accelerator Summit 무대 발표 선정 — APAC 전체에서 단 4팀.
변형체 부품(고무 씰 · 케이블 · FPC) 핸들링 알고리즘 검증 필요. 사내 R&D만으로는 전문 데이터셋·시뮬 도구 부족.
FEM 기반 변형체 거동 시뮬레이션 + 알고리즘 협업 가능성 논의. 적용 공정 후보 탐색 단계.
Force / Stress GT 적용 범위에 대한 초기 협업 논의 단계. 다음 액션: 후보 공정 1건 선정 · NDA · 동일 protocol 재측정 협의. 유료 PoC 전환 전 — 별도 확정 사항 없음.
글로벌 풀필먼트 자동화의 마지막 1마일 — 박스 · 봉지 · 소프트 패키지 등 변형 페이로드 핸들링. 강체 가정 시뮬로는 한계.
물류 환경 변형 페이로드 FEM/MPM 시뮬 데모. CES 2026에서 물류 로보틱스 전문가 컨택 → AWS Korea 후속 미팅.
AWS Activate ₩1,500만 크레딧 지원 확보 (2026.01). 물류 로보틱스 전문가 컨택 → AWS Korea 미팅 경유. 글로벌 인프라 네트워크 접점.
시뮬레이션 환경의 semantic labeling이 시각 라벨에 머무름 — 물체별 force/stress ground truth가 빠짐. LiDAR 인지와 접촉 데이터를 결합한 완전한 학습 데이터셋이 필요.
국내 LiDAR Tier-1 SOSLAB과 시뮬 환경 내 semantic + Force/Stress 통합 라벨링 협력 합의. 임의 물체에 대한 LiDAR × Force 통합 ground truth 라벨링 탐색 단계.
MOU 체결 (2026.05). 다양한 분야 협력 가능성 논의 — 후속 공동 PoC · 연구 검토 단계.
Space AI는 NVIDIA·Siemens·Ansys와 싸우지 않습니다. 레이어가 다릅니다 — Isaac Sim이 만든 무대 위에 접촉·물성(Force/Stress) 레이어를 얹습니다. 스택이 커질수록 그 위에서 검증할 Force/Stress 데이터 레이어 수요도 커집니다 — 경쟁이 아니라 보완재입니다. 코드는 열고, 데이터로 이깁니다.
"자동 전환" 없음. 각 단계마다 고객사 내부 평가위원회 / 구매 / 법무 절차 존중.
For Enterprise Customers — 투자 유치가 아닙니다. 회사 내부에서 즉시 검토 가능한 PoC 패키지가 산출물입니다. 미팅부터 검증 리포트까지 명확한 타임라인 + KPI 미달 시 회사 리스크 0의 Exit Plan.
For Enterprise Customers — 투자 유치가 아닌, "고객사 내부에서 바로 검토할 수 있는 PoC 패키지"가 산출물입니다. 1차 미팅에서 우선 검증 공정 1건 선정 → PoC 제안서 송부 → 12주 PoC 착수.
Pre-A 라운드 진행 중 · 18개월 표준 후보 레이어 검증 · 12주 PoC 매출 기반 · 외부 재현 검증 · 데이터룸 기반 DD 준비.
1차 미팅 후 데이터룸 접근 가능합니다.
대부분의 오픈소스는 묻힙니다. 그래서 우리는 '팔면 된다'가 아니라 시점별 KPI로 검증합니다.
2025–2026년, 4가지 신호가 동시에 떴다. 이 창은 길어야 18개월이다.
대기업 자동화 라인 기준 예시 TCO 모델. 실제 ROI는 고객사 baseline·PoC 결과에 따라 산정.
현재 공개 단계의 핵심은 H*** WIA 중심의 Force 데이터 협업 논의와 오픈소스 표준화 KPI입니다. 고객사명·개별 파이프라인·고객별 ARR 잠재치는 공개 사이트에 노출하지 않습니다.
즉각적인 DaaS 매출로 시작해, 반복형 SaaS로 마진을 높이고, 글로벌 확장형 Force/Stress API 후보로 확장합니다.
보수 시나리오. 핵심은 규모가 아니라 속도 — 투자 후 약 18개월 내 Series A 트리거가 결판납니다.
※ 본 수치는 확정 매출이 아닌 내부 목표 시나리오입니다. 고객 전환율·PoC 성공률·전사 도입 여부에 따라 달라질 수 있습니다.
우리가 푸는 시장은 공장 자동화의 마지막 30% — Goldman Sachs가 "수동 노동 20%" 라고 부른 영역. 그 위에 휴머노이드 시대가 열립니다. 단순 SW 판매가 아닌, Physical AI 인프라에서 Force/Stress 데이터 레이어의 초기 표준 후보로 포지셔닝합니다.
※ 시장 규모는 공개 리포트(Morgan Stanley · Strategic Market Research 등) 기반 환산치이며, Space AI의 직접 매출 가능 시장이 아닌 장기 인프라 기회로 제시합니다.
Physical AI에서 모델·하드웨어 레이어는 빠르게 가격이 매겨지고 있습니다. Space AI는 그 모델들이 학습할 Force/Stress 데이터 레이어에 집중합니다. 상세 비교 밸류에이션은 1차 미팅 후 데이터룸에서 공개합니다.
장기적으로는 Force/Stress 데이터 API와 물리 엔진 IP를 라이선싱하는 인프라 모델을 목표로 합니다. 상세 Exit 시나리오와 Comparable Valuation은 1차 미팅 후 데이터룸에서 공개합니다.
기술 검증 프로토콜 · 고객 상태값표 · IP 권리화 현황 · 재무 모델 · 정부 R&D·인프라 증빙 — 1차 미팅 후 데이터룸에서 공개합니다. 1차 미팅 후 접근 권한 부여.
아래 양식을 작성해 주시면, 김현규 대표가 1영업일 이내 직접 회신드립니다. Pre-A 라운드 자료(IR 덱·재무 모델)와 데모 영상을 함께 발송해 드립니다.
이메일 클라이언트가 열렸습니다. 전송 버튼을 눌러 주시면 김현규 대표에게 직접 도착합니다.
이메일이 열리지 않은 경우, 아래 주소로 직접 연락 주세요.
아래 양식을 작성해 주시면 김현규 대표가 1영업일 이내 직접 회신드립니다. 회사별 라인 환경에 맞는 PoC 후보 공정 1건 추천 + Sim-to-Real 검증 프로토콜을 함께 보내드립니다.
이메일 클라이언트가 열렸습니다. 전송 버튼을 눌러 주시면 김현규 대표에게 직접 도착합니다.
이메일이 열리지 않은 경우, 아래 주소로 직접 연락 주세요.
Figure AI가 다리를 움직이게 했다면, Space AI는 손이 만지는 것을 가르칩니다. NVIDIA · Universal Robots · Isaac Sim 생태계와 보완하는 Stage 4 — 로봇 시대의 마지막 데이터 레이어를 만듭니다. 이 카테고리의 표준 후보가 되는 것이 목표입니다.
비전이 같은 분, 가장 어려운 문제를 풀고 싶은 분을 모십니다. 김현규 대표가 1영업일 이내 직접 회신드립니다.
김현규 대표가 1영업일 이내 직접 회신드립니다.
전송이 되지 않은 경우, 아래로 직접 연락 주세요.